Project Goal
For our final project, my partner and I chose to tackle the issue of toilets being too loud when they flushed, which can scare some children, removing their desire to flush after themselves.
When we heard about this issue, we wanted to design a device that would not only ensure that children would have time to leave the stall before the toilet flushed, but also one that would still empower children to have a physical role in the process, as they would in situations where this device was not present.
We decided that this could be achieved through the use of a button, ultrasonic sensor, and automated flushing device. These three components would work together in the following process:
- An individual would press the button.
- The button press would trigger the ultrasonic sensor to start reading values
- The automated flushing device would activate based on the sensor readings:
- If a child is still in the stall, the flush will be delayed
- If there is no child in the stall, the toilet flushes automatically.
In this way the toilet would be flushed only when the child is ready, and has had time to leave the stall.
Design Process
For this project, our design process included the following steps which can be read about in greater detail in my previous posts:
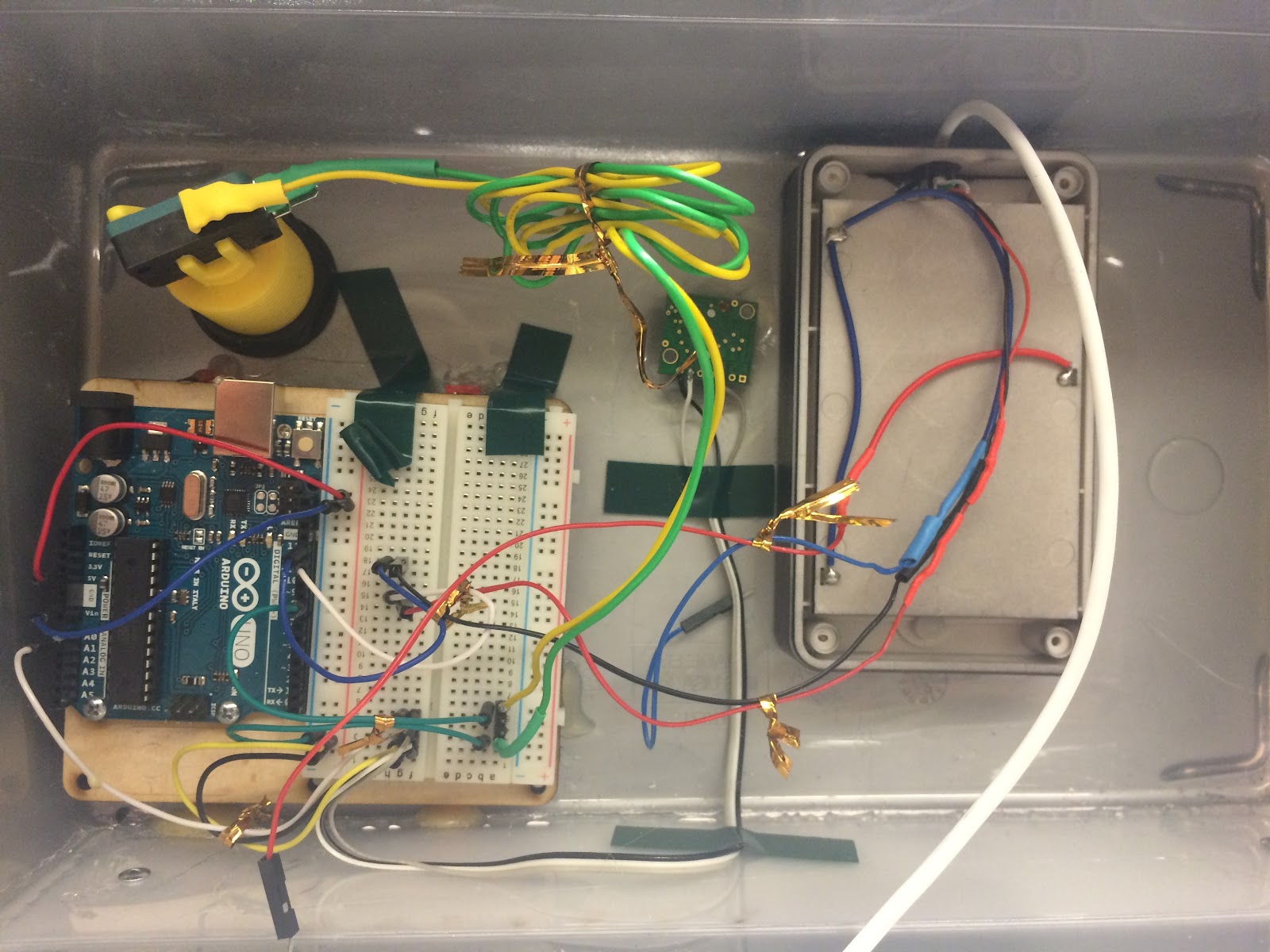
1) Connecting all the device components (battery pack, button, ultrasonic sensor, and flushing device) together so they could communicate:

2) CreatingMaking sure the components functioned together correctly with the final code:
 |
| Final Code |
3) Setting up a place to house all the device's components:

4) Setting up the flushing device motor within the toilet tank:

5) Attaching the device to the top of the toilet tank

The Final Product!

Below is a video of the motor of our final device in action. It's a bit hard to see the device work when it's all set up, so we removed the toilet tank's lid for demonstration purposes. All in all we were glad to see that our device worked how we wanted it to.
In the video above, the motor component of the device lifts up the valve shown below when activated, allowing water to enter the toilet bowl, and the flush process to begin.


Final Reflection
Working on this project has been a challenging, but rewarding experience. Even though we had challenges along the way with things like coding, and having soldered wires break apart, eventually we were able to develop a device that achieved our original goal; building a button/sensor automated toilet flusher.
With more time, however, there are a couple things we would like to improve on. For one, it would have been nice to have enough time to design and build our own flushing motor to put inside the tank, rather than to have to buy one. It would also have been good to try the device on an actual toilet with water in it to make sure that the set up of the device was alright and the timing of the motor was sufficient to allow enough water to enter the toilet bowl.
We could also experiment with different box designs to make a more secure, water tight, and small place to house our device's components.
All in all though, I am happy with how our project turned out. Having everything housed inside one box/the toilet tank means that the device is relatively easy to set up and be easily switched to other toilets. There is also little chance of individual components of the device getting individually damaged. With a little of the improvements mentioned before, this device could be ready to sell!










.JPG)





























{kind=link}